map
- map的数据结构
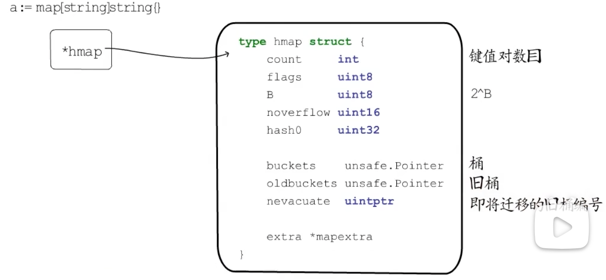
type hmap struct {
// Note: the format of the hmap is also encoded in cmd/compile/internal/reflectdata/reflect.go.
// Make sure this stays in sync with the compiler's definition.
count int // # live cells == size of map. Must be first (used by len() builtin)
flags uint8
B uint8 // log_2 of # of buckets (can hold up to loadFactor * 2^B items)
noverflow uint16 // approximate number of overflow buckets; see incrnoverflow for details
hash0 uint32 // hash seed
buckets unsafe.Pointer // array of 2^B Buckets. may be nil if count==0.
oldbuckets unsafe.Pointer // previous bucket array of half the size, non-nil only when growing
nevacuate uintptr // progress counter for evacuation (buckets less than this have been evacuated)
extra *mapextra // optional fields
}
- count:元素个数
- B buckets数量的对数
- hash0 哈希函数种子
- buckets buckets
- oldbuckets 扩容时的老buckets
- nevacuate 扩容进度
- extra 记录溢出桶的信息
- B 是 buckets 数组的长度的对数,即 buckets 数组的长度为 2^B,根据负载因子和初始化的map长度,能确认B的大小
- bmap数据结构
type bmap struct {
topbits [8]uint8
keys [8]keytype
values [8]valuetype
pad uintptr
overflow uintptr
}
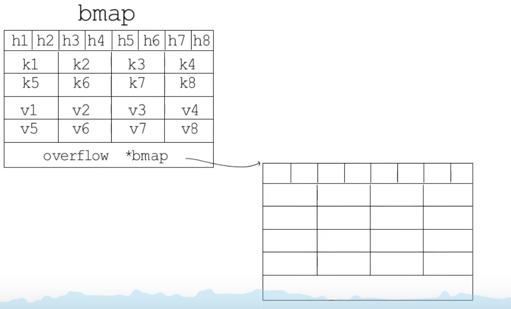
- bmap 就是人们常说的“桶”,桶里面会最多装 8 个
- key 和 value 是各自放在一起的,并不是 key/value/key/value/... 这样的形式。这样做的好处是在某些情况下可以省略掉 padding 字段,节省内存空间。
- 每个 bucket 设计成最多只能放 8 个 key-value 对, 如果有第 9 个 key-value 落入当前的 bucket,则需要再构建一个 bucket ,并且通过 overflow 指针连接起来。这 就是所谓的“链表法”。
- 在程序启动时,Go 会检测 CPU 是否支持 aes,如果支持, 则使用aes hash,否则使用memhash。
- 计算hash之后,使用后B位定位,对长度取模定位具体的bucket,再取hash值的高8位,找到key在bmap中的位置。如果tophash位置重复,则继续向后查找,本个hmap没找到,则去overflow里找
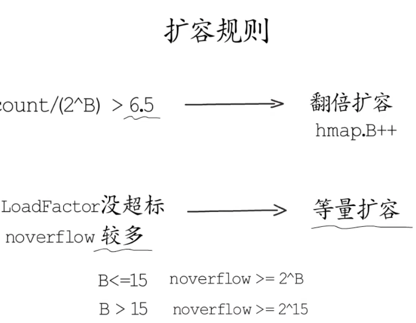
- 扩容条件:1、装载因子超过阈值(源码里定义的阈值是 6.5)。 2、overflow 的 bucket 数量过多:当 B<15,也就是 bucket="" 总数="" 2^b="" 小于="" 2^15="" 时,overflow="" 的="" 数量超过="" 2^b;="" 当="" b="">= 15,也就是 bucket 总数 2^B 大于等于 2^15, overflow 的 bucket 数量超过 2^15
- 针对1进行翻倍扩容,B + 1,针对2,进行等量扩容,
- 渐进式扩容:原有的 key 并不会一次性搬迁完毕,每次最多只会搬迁 2 个 bucket。
- 扩容中的遍历:扩容过程不是一个原子的操作, 它每次最多只搬运 2 个 bucket,所以如果触发了扩容操作,那么在很长时间里,map
的状态都是
处于一个中间态。map 遍历的核心在于理解 2 倍扩容时,老 bucket 会分裂到 2 个新 bucket 中去。而遍历操作,会按照新 bucket
的序号顺序进行,碰到老 bucket 未搬迁的情况时,要在老 bucket 中找到将来要搬迁到新 bucket 来的 key
map为什么是无序的?
1、触发2倍扩容后,元素的位置发生变化 2、每次遍历不是固定从0号bucket位置开始,而是每次随机获取一个bucket位置,这并且从这个bucket的一个随机需要cell开始。
map是线程安全么
在查找、赋值、遍历、删除的过程中都会检测写标志,一旦发现写标志置位(等于 1),则直接 panic
float类型可以做map的key么?
从语法上看,是可以的:Go 语言中只要是可比较的类型都可以作为 key,但是由于精度问题会导致一些诡异问题,最好不用。
如何比较两个map是否相等
1)都为 nil。 2)非空、长度相等,指向同一个 map 实体对象。 3)相应的 key 指向的 value “深度”相等。
可以对map元素取地址么
不能,扩容后地址会变
为什么选择渐进式扩容
避免性能抖动